Modeling of Switched Reluctance Motor Drive System
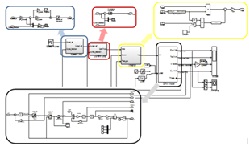
A system model is quite helpful in control algorithm development. However, SRM posed some unique challenges due to nonlinear characteristics, which were circumvented by using a look up table based approach in Simulink. The model, capable of transient and dynamic simulations, was further validated by correlating the torque – speed curves.