Servo Control System
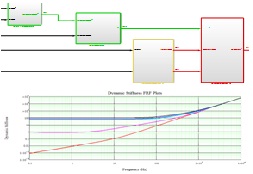
High performance servo systems rely on robust control system to meet demanding performance requirements. Using dynamic stiffness and eigenvalue migration chart as performance matrix, detailed trade off study between various control schemes (classical cascaded, state feedback, feed-forward,…) was performed to evaluate the right fit.